Implicit and Explicit Reconstruction
In surface reconstruction, we attempt to recover a mesh that describes the surface from a point cloud. Reconstruction can be divided between two types, one is implicit and the other explicit.
In explicit reconstruction, we construct the mesh through the physical properties of the mesh, for example, one method involves rolling a ball over the point cloud to define the surface. The crust method involves defining a Delaunay triangulation based on the spatial properties of the points.
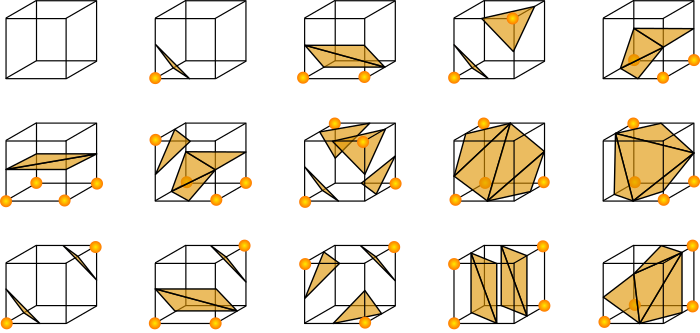
Implicit reconstruction on the other hand defines an implicit function over the 3d space. Through this, we can determine if a point in lies inside or outside of the mesh. A mesh generating algorithm such as marching cubes is then used to construct the triangles.
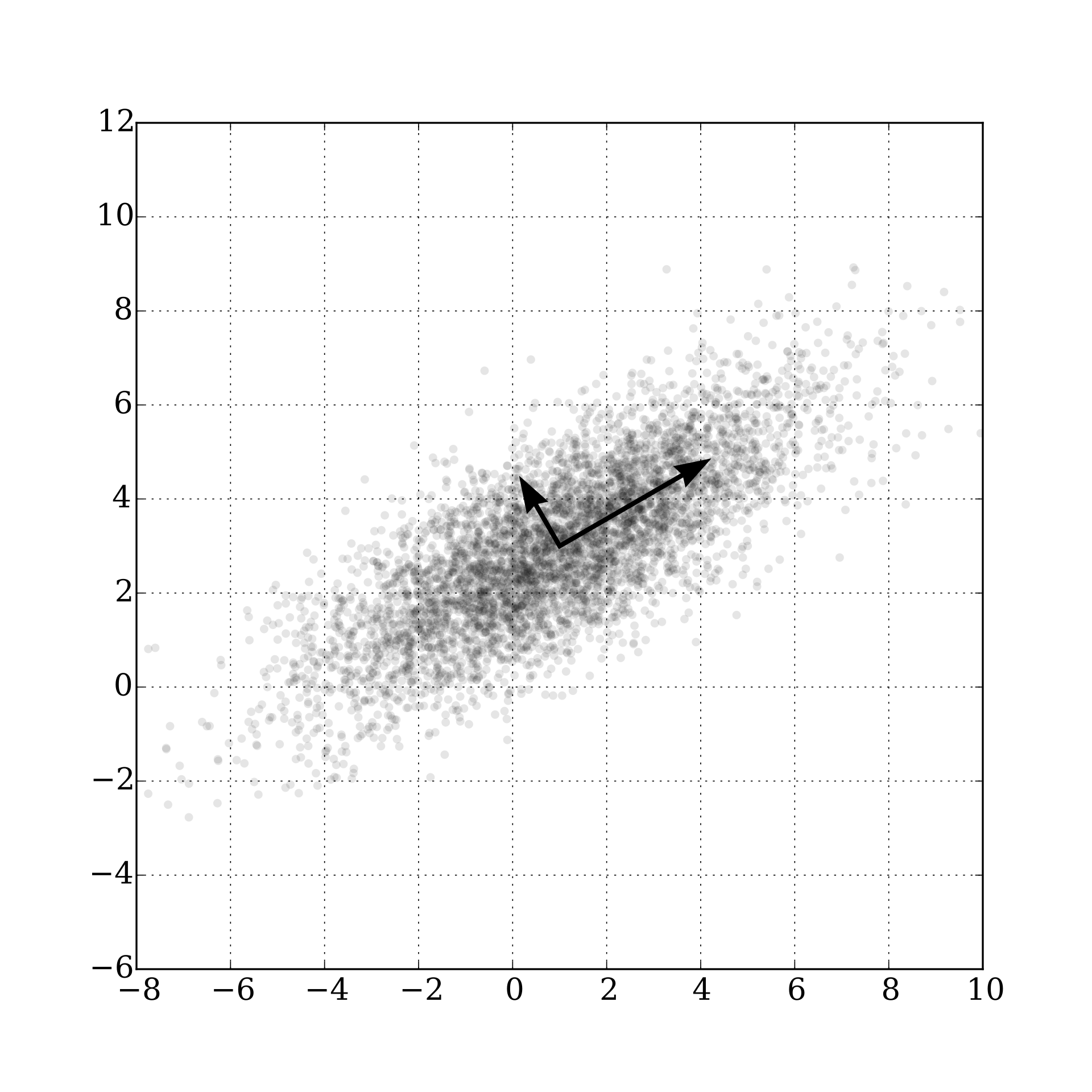
In reconstruction, the aim is to build a watertight mesh that is robust to noise. Noise in this case are the inaccuracies in the point cloud that we are given arising from sampling error.